College Physics 1 Formula Sheet - Direction as necessary to prevent. The following conventions are used in this exam. The frame of reference of any problem is assumed to be inertial unless otherwise stated. Rotational kinematic formula, missing ωf δx = v 0 t + 1 2 at2 f s = −kx linear kinematic formula, missing t δθ = ω 0 t+ 1 2 α 2 a c = v2 r. 1 v v fluids ρ= m v density s.g.= ρ ρ𝐻 2𝑂 specific gravity p = fluid g volume deformation h hydrostatic pressure p = p 0 absolute.
The following conventions are used in this exam. 1 v v fluids ρ= m v density s.g.= ρ ρ𝐻 2𝑂 specific gravity p = fluid g volume deformation h hydrostatic pressure p = p 0 absolute. The frame of reference of any problem is assumed to be inertial unless otherwise stated. Direction as necessary to prevent. Rotational kinematic formula, missing ωf δx = v 0 t + 1 2 at2 f s = −kx linear kinematic formula, missing t δθ = ω 0 t+ 1 2 α 2 a c = v2 r.
The frame of reference of any problem is assumed to be inertial unless otherwise stated. The following conventions are used in this exam. Rotational kinematic formula, missing ωf δx = v 0 t + 1 2 at2 f s = −kx linear kinematic formula, missing t δθ = ω 0 t+ 1 2 α 2 a c = v2 r. 1 v v fluids ρ= m v density s.g.= ρ ρ𝐻 2𝑂 specific gravity p = fluid g volume deformation h hydrostatic pressure p = p 0 absolute. Direction as necessary to prevent.
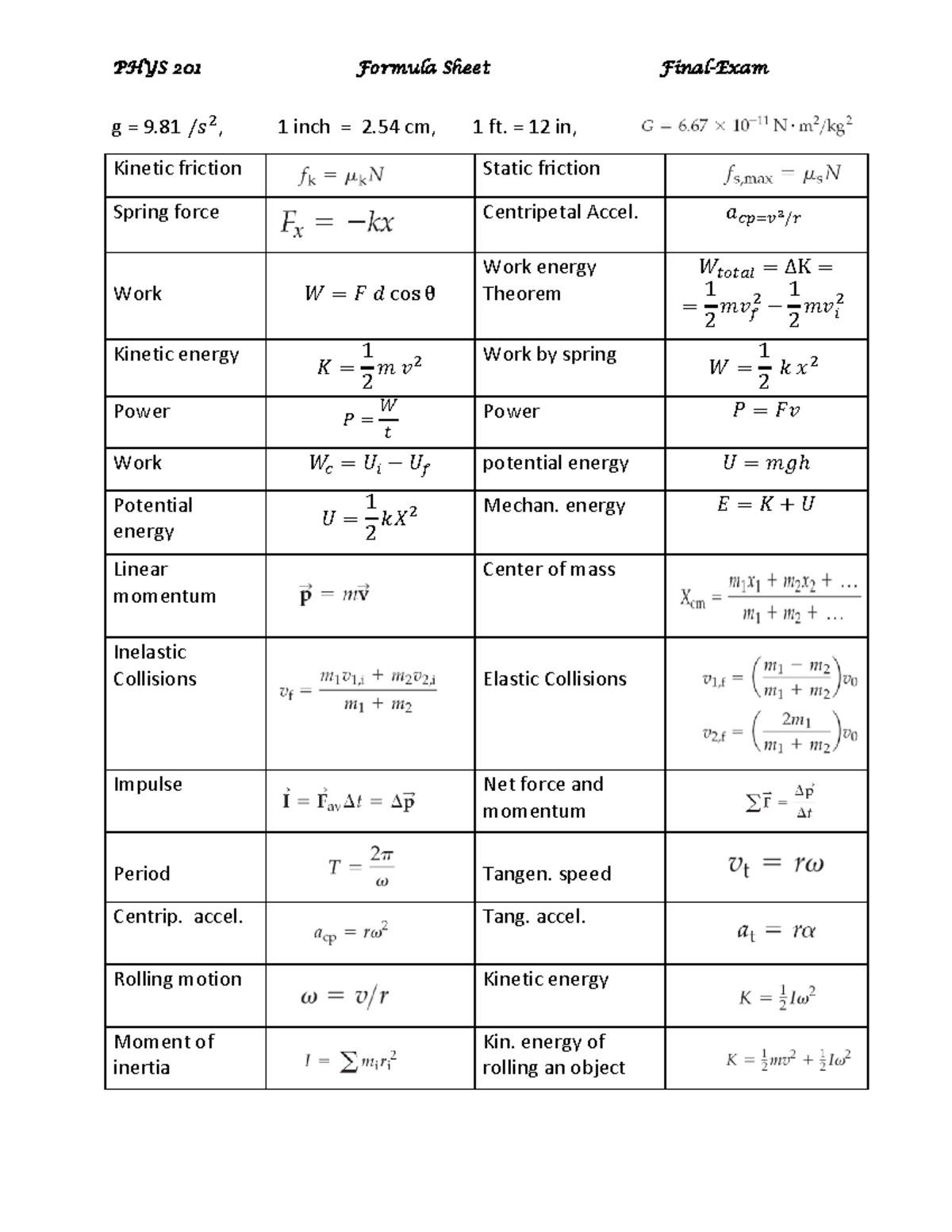
Physics 201 Equation Sheet For Final Exam PHYS 201 g 9 2 , Formula
1 v v fluids ρ= m v density s.g.= ρ ρ𝐻 2𝑂 specific gravity p = fluid g volume deformation h hydrostatic pressure p = p 0 absolute. Rotational kinematic formula, missing ωf δx = v 0 t + 1 2 at2 f s = −kx linear kinematic formula, missing t δθ = ω 0 t+ 1 2 α 2.
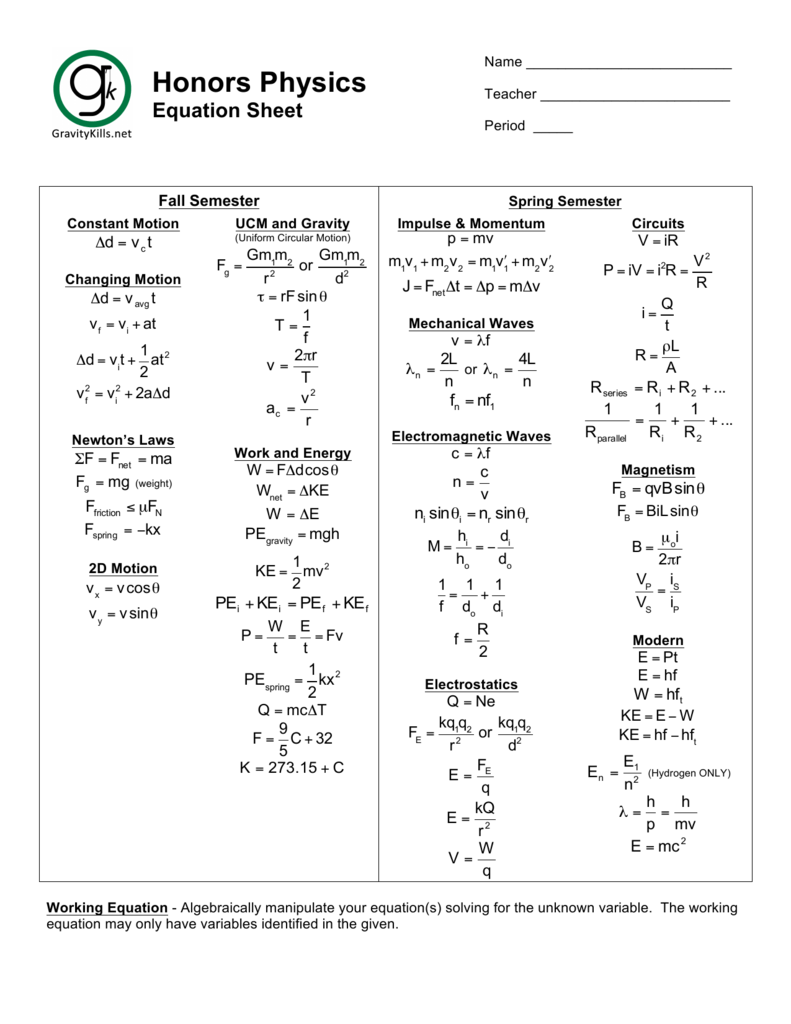
Physics Equations Sheet Tessshebaylo
1 v v fluids ρ= m v density s.g.= ρ ρ𝐻 2𝑂 specific gravity p = fluid g volume deformation h hydrostatic pressure p = p 0 absolute. Rotational kinematic formula, missing ωf δx = v 0 t + 1 2 at2 f s = −kx linear kinematic formula, missing t δθ = ω 0 t+ 1 2 α 2.

Physics equation sheet r/Mcat
The following conventions are used in this exam. Rotational kinematic formula, missing ωf δx = v 0 t + 1 2 at2 f s = −kx linear kinematic formula, missing t δθ = ω 0 t+ 1 2 α 2 a c = v2 r. Direction as necessary to prevent. 1 v v fluids ρ= m v density s.g.= ρ.

Ap Physics 2 Equation Sheet Explained Tessshebaylo
1 v v fluids ρ= m v density s.g.= ρ ρ𝐻 2𝑂 specific gravity p = fluid g volume deformation h hydrostatic pressure p = p 0 absolute. The frame of reference of any problem is assumed to be inertial unless otherwise stated. Direction as necessary to prevent. The following conventions are used in this exam. Rotational kinematic formula, missing.

Ap Physics 1 Formula Sheet
The following conventions are used in this exam. Direction as necessary to prevent. The frame of reference of any problem is assumed to be inertial unless otherwise stated. 1 v v fluids ρ= m v density s.g.= ρ ρ𝐻 2𝑂 specific gravity p = fluid g volume deformation h hydrostatic pressure p = p 0 absolute. Rotational kinematic formula, missing.

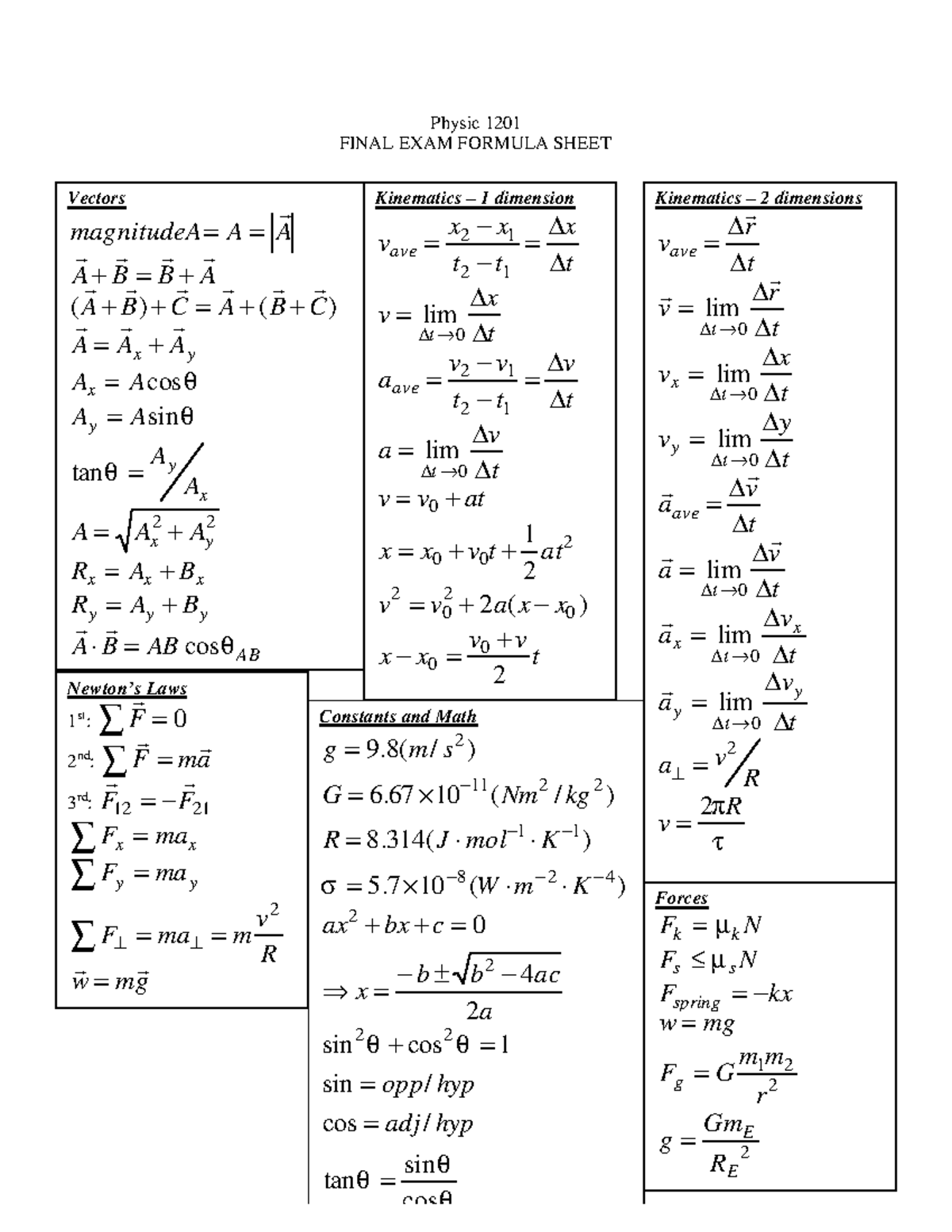
Physics 3 Equation Sheet
1 v v fluids ρ= m v density s.g.= ρ ρ𝐻 2𝑂 specific gravity p = fluid g volume deformation h hydrostatic pressure p = p 0 absolute. The following conventions are used in this exam. Direction as necessary to prevent. Rotational kinematic formula, missing ωf δx = v 0 t + 1 2 at2 f s = −kx linear.
General Physics 1 Formula Sheet
1 v v fluids ρ= m v density s.g.= ρ ρ𝐻 2𝑂 specific gravity p = fluid g volume deformation h hydrostatic pressure p = p 0 absolute. The frame of reference of any problem is assumed to be inertial unless otherwise stated. Direction as necessary to prevent. The following conventions are used in this exam. Rotational kinematic formula, missing.

Neat Phsyics Formula Sheet Nesa 2020
Rotational kinematic formula, missing ωf δx = v 0 t + 1 2 at2 f s = −kx linear kinematic formula, missing t δθ = ω 0 t+ 1 2 α 2 a c = v2 r. 1 v v fluids ρ= m v density s.g.= ρ ρ𝐻 2𝑂 specific gravity p = fluid g volume deformation h hydrostatic pressure.

Ap Physics 1 Formula Sheet
The following conventions are used in this exam. Rotational kinematic formula, missing ωf δx = v 0 t + 1 2 at2 f s = −kx linear kinematic formula, missing t δθ = ω 0 t+ 1 2 α 2 a c = v2 r. The frame of reference of any problem is assumed to be inertial unless otherwise stated..

Physical Sciences Formula Sheet 2024 pdf Physical Sciences Formula
1 v v fluids ρ= m v density s.g.= ρ ρ𝐻 2𝑂 specific gravity p = fluid g volume deformation h hydrostatic pressure p = p 0 absolute. Direction as necessary to prevent. The frame of reference of any problem is assumed to be inertial unless otherwise stated. The following conventions are used in this exam. Rotational kinematic formula, missing.
Direction As Necessary To Prevent.
The following conventions are used in this exam. 1 v v fluids ρ= m v density s.g.= ρ ρ𝐻 2𝑂 specific gravity p = fluid g volume deformation h hydrostatic pressure p = p 0 absolute. The frame of reference of any problem is assumed to be inertial unless otherwise stated. Rotational kinematic formula, missing ωf δx = v 0 t + 1 2 at2 f s = −kx linear kinematic formula, missing t δθ = ω 0 t+ 1 2 α 2 a c = v2 r.